

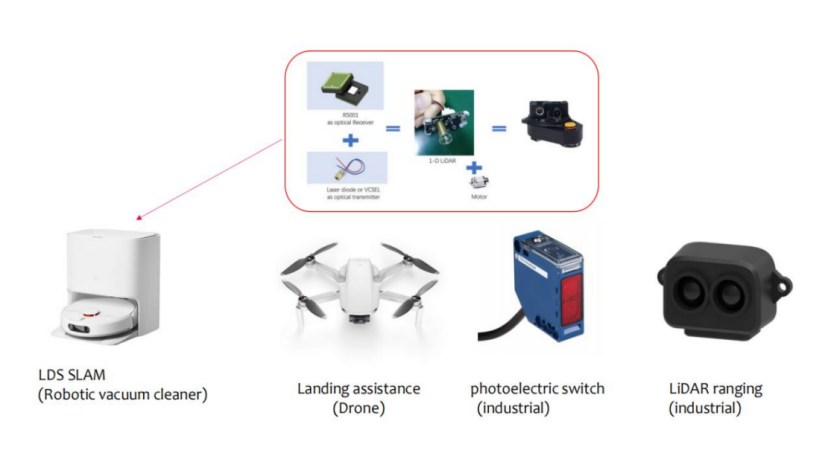
大户型建图偏差、强光下测距失效、深色物体识别困难、边缘漏扫:这些扫地机器人行业的共性痛点,根源在感知层存在盲区。锡产微芯传感器事业部自研R5001与M8001dToF芯片,从导航与避障两侧提供芯片级应对方案。本文从技术场景切入,拆解芯片如何帮助扫地机器人突破感知瓶颈。

一、R5001:长距离导航与建图
1、大场景建图能力
传统三角法激光雷达面对大客厅、长走廊时常常力不从心,测距短、信号弱,导致机器人建图出现偏差,R5001最远测距可达60米。即便是200平米的大户型,机器也能建图到位,无需反复探索补图。
2、强光环境下的测距稳定性
阳台推拉门边、落地窗旁,往往是扫地机的“翻车高发区”。强烈的太阳光干扰让红外信号信噪比骤降,机器要么原地打转,要么盲目冲撞。R5001芯片表面覆盖905nm/940nm滤光片,配合内置抗阳光算法,可在100KLux照度下稳定工作。不仅能应对室内阳光直射,甚至可胜任户外场景,让扫地机器人真正不畏光。
3、测距精度与户型还原
建图不仅要广,更要精。R5001在全量程范围内测距误差不超过±1.5cm,分辨率达到1.2mm。这样的精度意味着能清晰分辨地毯边缘、门槛落差、家具腿的轮廓,在建图时还原真实户型结构,为后续路径规划打下坚实基础。
二、M8001:近距离避障与边缘检测
1、悬崖检测与防跌落
传统红外传感器有时会因地面材质反光差异而误判,导致机器踏空。M8001采用dToF原理,不受地面颜色和材质影响。当机身探到楼梯边缘时,可以快速做出判断,果断刹车。得益于集成ROM设计,启动时间小于10ms,无需等待外部MCU加载程序,响应比同类方案更快。
2、低矮/深色物体识别与绕行
家具腿细、拖鞋矮、黑色地毯吸光,传统红外传感器要么探测不到,要么测距不准。M8001内置片上直方图算法,可有效消除串扰,并对污痕进行动态补偿。即便传感器表面沾染灰尘,或被黑色低反射率物体遮挡,依然能准确判断距离。配合200Hz的高帧率,机器人能以更细腻的轨迹贴边清扫、绕桩避障,告别莽撞的表现。
3、沿墙清扫与盲区覆盖
留灰带、漏边角的根源在于传感器存在盲区,M8001采用VCSEL发射器和SPAD接收器集成封装,尺寸仅4.8mm×2.6mm×1.1mm,可灵活布置在机身侧边或底部,覆盖视觉盲区。既能用于沿墙检测,也能做上扬探测防止卡困,有效消除清扫死角。
从芯片到系统:传感器的整合路径
从这两款芯片的协同进化中,我们看到的不仅是两颗芯片的技术突破,更是锡产微芯传感器走向系统整合的清晰轨迹。R5001以深远视野,突破导航的精度与广度;M8001以机敏之态,守住避障的安全与细腻,让扫地机器人真正看懂我们的家。用技术创新消解用户的真实痛点,整个行业也便踏入了从智能清扫向全屋环境深度理解的阶段。这既是锡产微芯传感器给出的答案,也是中国智造在全球智能家居浪潮中不可或缺的一笔。
sparcsensor@ic-sparc.com
+86 13701993643
+49 (0) 871 660 665-0